お問い合わせ
お問い合わせ

バーチャルデータ
環境開発
高精度バーチャルシナリオデータ提供・
開発支援
概要
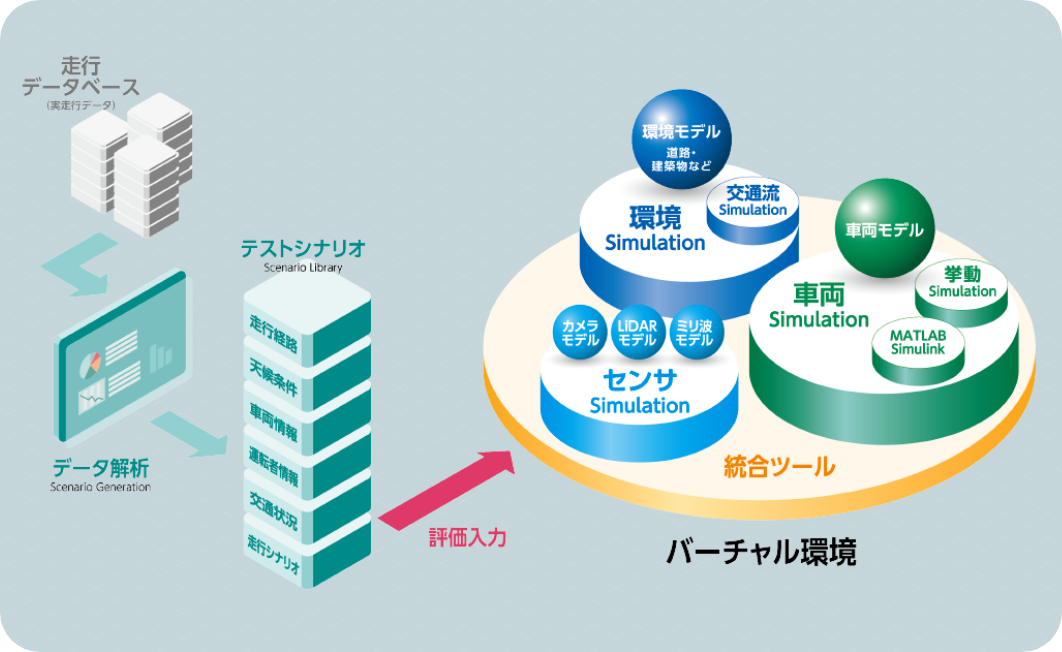
自動運転の安全性を検証するために膨大な走行データが必要となっていますが、実走行だけではデータ量が不足しています。そのため、自分たちでデータを加工できるバーチャル環境を用いた評価が主流となってきています。また、自車周囲の物体認識だけでなく状況判断技術の重要性が高まっており、それら評価を行うために周囲の挙動を定義したシナリオ評価が必要になってきています。
当社は実際に収集した走行データから、高精度な位置情報認識技術を用いた解析を通じ、実際の走行挙動を再現したシナリオデータを提供します。
-
データ解析
車両に搭載されているセンサデータを解析してパラメータ化を行います。
本技術は開発中です。ご興味のある方はお問い合わせください。
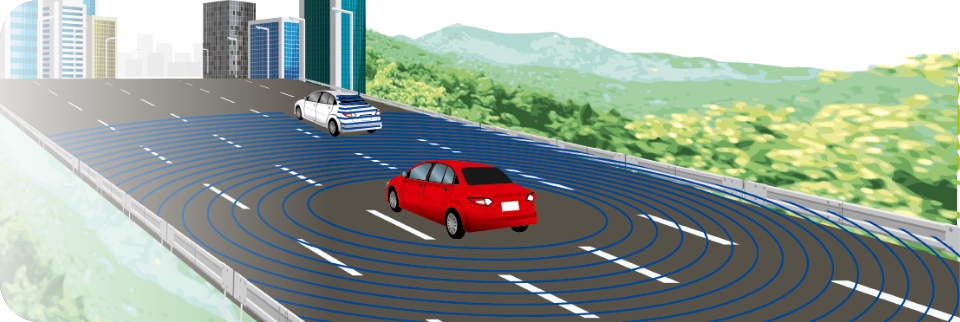
GNSSやIMUの取得データ及び、走行経路の地図データを用いて高精度な自車位置を算出すると共に、周辺監視カメラやLiDARの取得データを用いて自車周辺物体の種別と距離を算出します。自車周辺の位置情報や動きの変化を元にして、周囲物体がどのような挙動で行動しているかをパラメータ化します。
GNSS:Global Navigation Satelite System(全球測位衛星システム)
IMU:Intertial Measurement Unit(慣性計測装置)
LiDAR:Light Detection and Ranging(光による検知と測距)
-
シナリオ化
パラメータ化されたデータ解析結果をカットイン・カットアウトなどの行動シナリオ毎に分類します。
本技術は開発中です。ご興味のある方はお問い合わせください。
パラメータ化データをお客様がご利用している評価環境に合わせてフォーマット変換することで、バーチャル環境下で安全性評価が可能な交通外乱テストシナリオデータの生成を行います。当社が作成するシナリオデータは、基本的に実走行データを元に生成するため、実際の運転挙動に近い高精度なシナリオデータを提供します。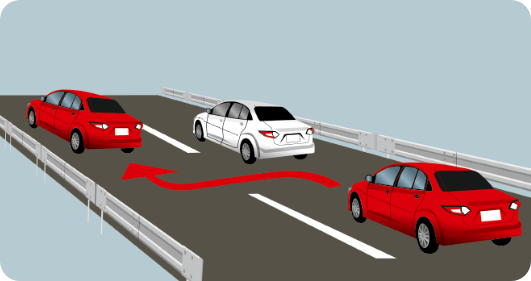
-
3DMAPデータ生成
評価用のシナリオデータをバーチャル環境下で実行するために必要な3DMAPデータを生成します。
本技術は開発中です。ご興味のある方はお問い合わせください。
実在する高精度な3DMAPデータの生成だけでなく、絶対位置にこだわらずシナリオ評価を実施したい方向けの安価な3DMAPデータの生成も行います。
また、バーチャル環境下で利用するCGモデルのデータ作成対応も行います。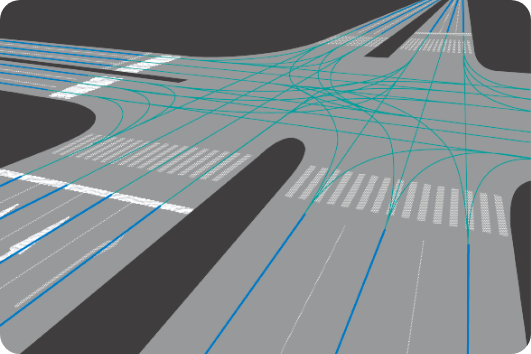
-
開発環境支援
バーチャル開発環境で評価を行うための統合ツール、入力データ、モデルの提供及び開発環境支援を行います。
提供・対応できる内容にご興味のある方はお問い合わせください。